本帖最后由 muoubear* 于 2021-10-22 15:06 编辑
NX 1872运动仿真模块新增了一个链传动系统功能,它能帮助我们更方便的设计链传动,并进行运动仿真,在该功能出现之前,用NX软件设计链条系统并进行运动仿真都需要花费较多的精力,而使用NX 1872的链传动系统,我们可以较方便的设计链条,皮带,线缆这类传动链。
通常一个完整的链轮传动系统,由驱动轮,从动轮,导轨(可无),张紧器(可无),和完整链条构成。最简单的链条传动可以仅有主动轮,从动轮和完整链条,此时该主动轮或从动轮也充当张紧轮的角色。
使用链传动系统对模型的要求:用仿真模块的这个新功能创建链条传动并进行仿真时,模型需要满足以下条件:
链传动系统对话框的功能简要讲解:
链传动系统设计都是在链传动对话框中进行,该对话框有三个选项卡,分别是布局,阵列,高级报告。
系统将链轮(sprockets)带轮(wheel),导轨(guides),这些称之为布局单元,布局选项卡的功能就是添加布局单元到链传动系统中,并对添加的布局单元进行参数配置,如指定链轮齿数,链轮处于闭合传动链的内侧还是外侧等。
以上三个布局单元都可以被选做张紧器使用,并有两种方式进行张紧调节:旋转和滑动。通过使用张紧器,就可以让链传动系统的链条完美闭合。
布局选项卡中的路径为链条链节中心点运动的轨迹线,通过指定阵列单元的尺寸,点击计算路径,系统会自动给出路径草图,并将该路径草图选中。也可以手动选择已经绘制好的路径草图。
系统将链节运动体称之为阵列单元,阵列选项卡的功能是让阵列单元沿布局中的选定的路径进行阵列,完成链条的设计工作。阵列单元通常需要4个链节运动体,需要手动添加的称之为第一复制单元,和第二复制单元。结束单元为链条的最后一节链节,与第一复制单元相连。相邻单元为与第二复制单元相连的链节运动体。
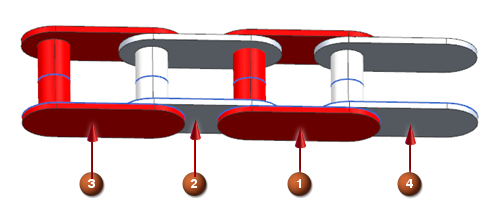
图1 ① 第一复制单元; ② 第二复制单元; ③ 相邻单元; ④ 结束单元
高级报告选项卡为可选项,它能够绘制与传动链相关的结果图(如最大张紧力或平均力的大小)。
平面链传动系统运动仿真的一般步骤:
NX 1872的链传动系统的设计流程:
将链轮(驱动轮,从动轮),导轨,张紧轮,链节这些模型创建为运动体; 链节间创建旋转副,和其他连接器(衬套,阻尼器和弹簧); 链节与链轮间创建分析接触; 在链传动系统对话框的布局选项卡中,选择2D类型,指定布局平面; 点击+号,首先创建的链轮为主链轮,原点为其链轮几何中心,矢量为过链轮几何中心,任意齿槽的中心线,指定链轮在闭合路径的内侧还是外侧,键入链轮齿数; 链轮传动系统的布局单元必须按逆时针方向进行创建,以图2为例,即驱动链轮,导轨,第二链轮; 再次点击+号,根据需要创建导向器和其他从动链轮,导轨与链条接触的表面需要有辅助草图,用于系统自动生成路径草图用,创建的时候需要手动选择该草图; 在阵列单元尺寸组,键入标称节距,外侧高度,内侧高度,点击计算路径,系统会根据以上设定参数,自动绘制路径草图,并默认以此草图作为链条的阵列路径。 在链传动系统对话框的阵列选项卡中,点击+号,创建第一复制单元和第二复制单元,然后指定结束单元和相邻单元,点击计算实例数,系统会根据在布局选项卡中所选的路径草图,自动计算出所需的链节数量。点击构建阵列实例,链节模型就沿着路径按计算出的实例数进行阵列,此时得到的链条结束单元与第一复制单元有可能存在间隙。 在布局选项卡中,主链轮,导轨,从动轮均可以通过勾选添加张力器复选框,使其变成张紧器,张紧器可以通过旋转或者滑动的方式,根据阵列选项卡中的实例数,点击布局选项卡中的计算路径,由系统自动进行路径重绘。然后返回到阵列选项卡,点击构建阵列实例,就可以得到完整的链条。 对驱动链轮和从动链轮添加固定旋转副; 对驱动链轮的旋转副添加驱动; 给出解算方案,求解; 查看动画。
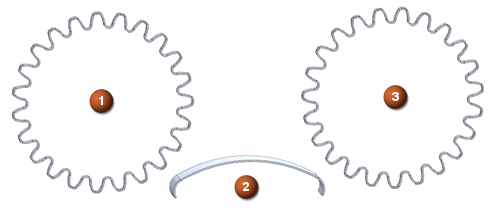
图2 ① 驱动链轮; ② 导向器; ③ 第二链轮
以上图片均来源于NX官方在线帮助文档。
PS:链条传动系统的运动仿真是基于接触的仿真,构建阵列实例时,软件也会复制链节间的旋转副关系,以及链节与链轮间的接触,但不支持点在线上副,所以无法使用点在线上副的方式进行仿真。
NX官网在线帮助文档有链轮传动系统的图文教程,并且带有案例文件下载,点击本篇文章末的阅读原文,可以跳转到该教程页面。
后面的文章我会根据个人对该教程的理解进行翻译,译文内容仅供参考,若读者存在理解困惑,可点击文章末的阅读原文,跳转至在线帮助进行原文阅读。
| 

 发表于 2021-10-22 15:04:50
发表于 2021-10-22 15:04:50